Paramètres du moteur du chien robot
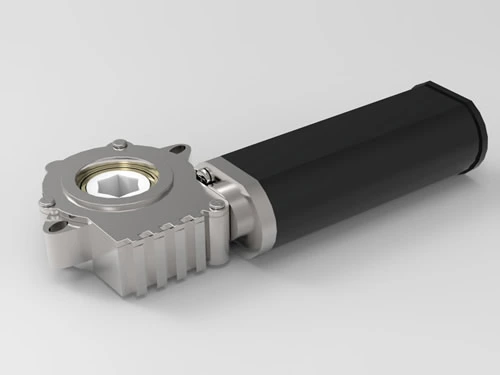
Le moteur de chien robot est un système de transmission de moteur à micro-engrenage utilisé pour l'entraînement intelligent du joint de chien robot. La structure de transmission principale est composée d'un moteur d'entraînement (micromoteur) et d'une boîte de vitesses (réducteur). Le moteur d'articulation de chien robot peut conduire le chien robot à marcher de manière adaptative. Il permet au chien robot de gravir des pentes et de marcher sur des chemins gravillonnés. En se déplaçant vers l'avant, vers l'arrière, vers le haut, vers le bas, l'angle de lacet, l'angle de tangage et l'angle de roulis peuvent être contrôlés lors de la marche sur une terrasse inégale. Ce type de paramètres techniques doit être personnalisé, tels que la puissance de sortie, le couple de sortie, le bruit, la précision, le mode de transmission de la boîte de vitesses, les performances du moteur d'entraînement. ZHAOWEI Machinery & Electronics Co., Ltd s'engage à fournir un service de personnalisation complet.
Paramètres du moteur de chien robot :
| Matériel | Métal |
|---|---|
| Diamètre extérieur | 24mm |
| Température de fonctionnement | -20℃~+100℃ |
| Direction de rotation | cw&ccw |
| Jeu d'engrenage | ≤3° |
| Tension (facultatif) | 3V~24V |
| Palier | Palier poreux/palier à roulement |
| Vitesse d'entrée | ≤15000tr/min |
| Jeu axial axial | ≤0.3mm/≤0.2mm |
| Courant | 300mA maximum |
| Charge radiale sur l'arbre de sortie | ≤120N/≤170N |
| Moteurs (facultatif) | Moteur pas à pas/cc |
Personnalisation
Nom du projet : moteur de joint de robot
Contexte du projet : dans l'interaction et la communication à réponse rapide, le moteur à engrenages à courant continu pour robot est utilisé pour entraîner les articulations du robot, ce qui nécessite un grand rapport puissance/masse et un rapport couple/inertie, un couple de démarrage élevé, un faible inertie, et une plage de réglage de vitesse large et fluide. En particulier, la pince robotisée doit utiliser un moteur de robot avec un petit volume et une petite masse, et une grande capacité de surcharge en peu de temps.
Réalisation : le robot est combiné avec le servomoteur de robot planétaire ZHAOWEI, ce qui peut grandement améliorer la qualité et l'efficacité du robot. Le moteur à engrenages à courant continu pour robot a des changements de transmission à deux étages, trois étages et quatre étages. Le rapport de réduction, la vitesse d'entrée et le couple de la boîte de vitesses peuvent être ajustés en fonction des exigences de conception du moteur du robot.