Paramètres du moteur à engrenages du robot
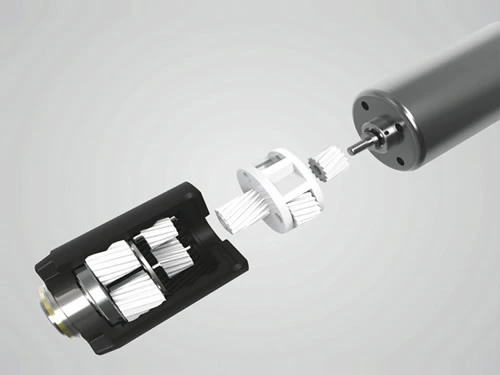
Le moteur à engrenages du robot est la combinaison d'une boîte de vitesses et d'un mini moteur de robot utilisé pour le robot intelligent. C'est un système de transmission de réduction composé d'un moteur d'entraînement (micro moteur) et d'une boîte de vitesses (réducteur). Le moteur du mini robot a pour fonction de décélérer et d'augmenter le couple du moteur du robot, ce qui peut permettre au robot de se déplacer et de marcher. Par exemple, un moteur à balais CC, un servomoteur, un moteur pas à pas peuvent être utilisés comme source d'entraînement et un codeur peut également être installé. La boîte de vitesses planétaire, une boîte de vitesses en plastique ou une boîte de vitesses métallique, une boîte de vitesses à vis sans fin, une boîte de vitesses à arbres parallèles, une boîte de vitesses cylindrique peuvent être utilisées comme réducteur. Les paramètres, tels que la puissance de sortie, la vitesse de sortie, le rapport de réduction, le couple de sortie, la tension nominale, les diamètres, la structure de la boîte de vitesses, le bruit de transmission, la précision de transmission, la température de fonctionnement sont développés sur mesure. ZHAOWEI Machinery & Electronics Co., Ltd s'engage à fournir des systèmes de développement et de fabrication de moteurs à engrenages pour robots intelligents avec des paramètres techniques personnalisés (diamètre : 3,4 mm à 38 mm, tension : moins de 24 V, puissance de sortie : moins de 50 W, vitesse de sortie : 5 tr/min- 2000 tr/min, rapport de démultiplication : 5-1500). Couple de sortie : 1,0 gf.cm -50kgf.cm. Le jeu de la boîte de vitesses est inférieur à 1 à 2 minutes d'arc et le bruit de transmission des engrenages est inférieur à 45 dB.
Paramètres du moteur à engrenages du robot :
| Matériel | Métal |
|---|---|
| Diamètre extérieur | 38mm |
| Température de fonctionnement | -30℃~+100℃ |
| Direction de rotation | cw&ccw |
| Jeu d'engrenage | ≤2° |
| Tension (facultatif) | 3V~24V |
| Palier | Palier poreux/palier à roulement |
| Vitesse d'entrée | ≤15000tr/min |
| Jeu axial axial | ≤0.1mm/≤0.1mm |
| Courant | 300mA maximum |
| Charge radiale sur l'arbre de sortie | ≤120N/≤180N |
| Moteurs (facultatif) | Moteur pas à pas/cc/servo |
Personnalisation
Nom du projet : Moteur de roue de robot
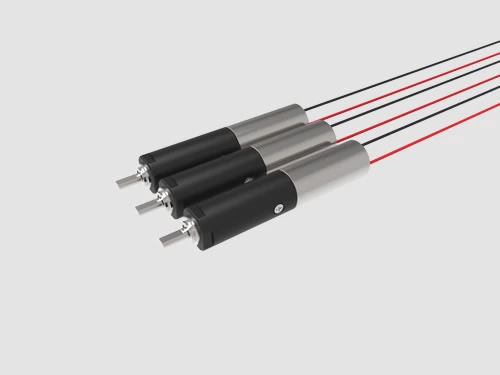
Contexte du projet : les robots sont divisés en type de roue, type de jambe, type de chenille, type de serpent et type composé selon le mode de mouvement. Parmi eux, les robots à roues occupent une place relativement importante dans le domaine des robots mobiles autonomes. Ils ont les caractéristiques d'un mouvement rapide et d'un contrôle simple et sont largement utilisés dans les lignes de production de palettisation automatique, les véhicules sans pilote et d'autres domaines.
Réalisation technique : la partie motrice du robot à roues adopte une combinaison d'un moteur à courant continu et d'un réducteur planétaire de 38 mm avec la méthode d'installation anti-symétrique. (Le moteur pas à pas pour les roues de robot est également un type courant.) Cette méthode peut réduire la force de l'arbre de sortie du réducteur, raccourcir considérablement l'empattement et économiser de l'espace à condition que le jeu de roues soit coaxial et qu'une grande puissance soit nécessaire. (Généralement, la taille et la puissance du moteur sont dans une certaine proportion). De cette manière, le moteur de roue du robot peut être de petite taille.