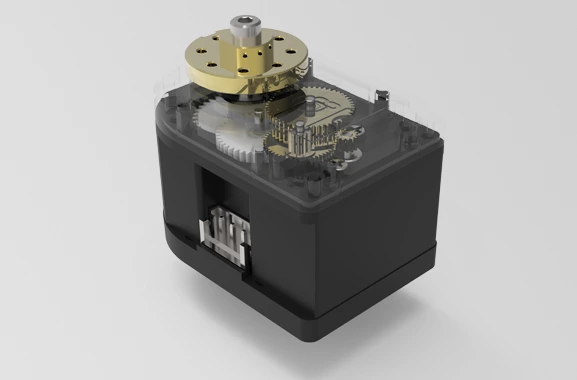
Un servomoteur se compose d'un micromoteur, d'un ensemble de réducteurs, d'un potentiomètre (connecté au réducteur pour fonctionner comme un capteur de position) et d'un contrôleur (comprenant généralement un comparateur de tension, un signal d'entrée et une alimentation).
En quoi les servomoteurs sont-ils différents des moteurs pas à pas ?
Un servomoteur est un système composé de micromoteurs (généralement des moteurs pas à pas et des moteurs sans balais) et de divers composants. Lorsque des impulsions électriques sont appliquées aux bobines du stator, le moteur pas à pas génère un champ magnétique pour attirer le rotor à aimant permanent. L'erreur du servomoteur est généralement faible. Étant donné que la puissance du micro servomoteur provient du micro moteur, il doit y avoir un contrôleur qui envoie des commandes au micro moteur. Le système de servomoteur doit également avoir simultanément un contrôle de rétroaction.
Principe
L'engrenage de sortie du groupe d'engrenages de réduction interne du système d'asservissement est connecté à un potentiomètre pour former un capteur de position. L'angle de rotation de ce système de servomoteur est donc affecté par l'angle de rotation du potentiomètre. Les deux extrémités du potentiomètre sont connectées aux pôles positif et négatif de l'alimentation, et l'extrémité coulissante est connectée à l'arbre rotatif. Le curseur tourne avec l'arbre, ce qui fait que la tension entre l'extrémité du curseur du potentiomètre et l'extrémité négative de l'alimentation change avec la rotation de l'arbre. Cette tension est l'alimentation d'entrée du comparateur de tension (amplificateur opérationnel). Le signal de commande sera envoyé à l'amplificateur opérationnel avec la tension d'entrée. Le signal de commande d'entrée est un signal de modulation de largeur d'impulsion (PWM) et la tension moyenne change proportionnellement à la haute tension dans une période médiane.
Contrôle de la direction du micromoteur
Tout d'abord, comparez la tension moyenne du signal d'entrée avec la tension du capteur de position de puissance. Si la tension d'entrée est supérieure à la tension du capteur de position de puissance, l'amplificateur délivre une tension d'alimentation positive. Si la tension d'entrée est inférieure à la tension du capteur de position, l'amplificateur délivre une tension d'alimentation négative. C'est une tension inverse. De cette manière, les directions CW et CCW du micromoteur sont contrôlées et le système d'asservissement est contrôlé par le jeu de réducteurs. Si le potentiomètre et l'accouplement de l'engrenage de sortie ne sont pas liés, ils peuvent être couplés à d'autres arbres du réducteur pour contrôler le rapport d'engrenage afin d'obtenir une plus grande plage du système d'asservissement, y compris une rotation de 360°. Cela peut entraîner une erreur plus importante, mais ne produira pas d'erreur cumulative.
Applications étendues
Les servomoteurs peuvent être appliqués à divers bras mécaniques, robots et portes automatiques. Il existe également des servomoteurs spéciaux à couple élevé et haute précision pour les domaines nécessitant une grande précision ou un couple élevé pour une charge importante. Lors de la sélection d'un modèle, nous devons prioriser le couple. Comment choisir soigneusement et économiquement en fonction des exigences du système de servomoteur est également une connaissance indispensable, qui peut nécessiter plus de pratique.